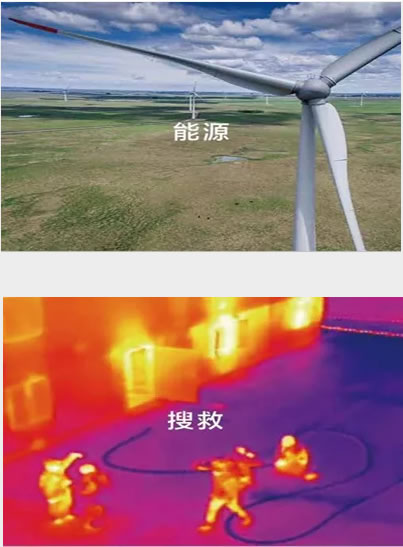
近年来人们看到的许多山河风光,还有校园全景等需要全场照片的,都是用无人驾驶飞机中的航拍无人机来完成的。航拍无人机的飞行高度通常在五百米之上,十分适用于拍摄鸟瞰图这种全景。
往前看,随着机载传感器、定位的精细程度和执行任务的复杂程度不断上升,对数据链的贷款提出了很强的要求,未来随着机载高速处理器的突飞猛进,预计几年后现有射频数据链的传输速率将翻倍,未来在全天候要求低的领域可能还将出现激光通讯方式。
无人机系统由飞机平台系统、信息采集系统和地面控制系统组成。ZUI初的一代主要以侦察机为大宗,一些无人机已经装备了武器(例如RQ-1捕食者装备AGM-114地狱火空对地导弹)。由无人机担任更多角色的军事预想,ZUI初是轰炸和对地攻击,空对空战斗,飞行员ZUI后一块领域。装备有武器的无人机被称为无人战斗机飞机(UCAV)。
一、一个好的职业飞手,操作无人机时打杆的特点应该是小幅度,高频率的,而且打杆的手指一定是自然放松的,不是紧张僵硬的,能够让无人机走出精准、匀速的航线。
二、无人机培训
地面理论训练内容包括8个项目,实践飞行训练包括8个项目。一般培训分为驾驶员与机长两个级别。其中驾驶员飞行培训不少于44小时,机长培训不少于56小时,如果希望担任飞行教员,那么培训要求100小时以上机长经历,两年以上工作经验。一般无人机驾照的培训费用大概在八千至两万不等。
三、无人机操作中的一键放生:一般指一键返航时无人机飞丢,放生的原因可能是撞到障碍物、指南针受到干扰或者GPS失去信号。
提控回家:指无人机飞丢,找不到,无奈只能拎着遥控器回家。
冗余:为增加可靠性,在必备系统基础上增加备份。如使用双IMU,在一个IMU故障时可由另一个IMU承担其功能,六轴如动力有冗余,在单个电机缺少动力时仍可飞行。
信道:是信号在通信系统中传输的通道,如同一场地内多架飞机使用同一信道,图传会相互干扰。
过放:电池正常放电至截止电压后,继续放电导致电池内部遭到不可逆的损坏。
射桨:在电机旋转过程中,原本在电机上的螺旋桨脱离飞出被称作射桨。
果冻:航拍中所说的「果冻」是由于震动过大、减震球不合适等原因造成照片、视频中出现类似下图的抖动现象,由于神似被戳动的果冻而被成为“果冻”。
丢星:飞机GPS模块搜不到足够的卫星,容易导致飞机无法定点悬停,发生飘移。
压差:无人机锂电池由数块电芯串并联而成,通常电芯电压相近,电芯ZUI高与ZUI低电压的差值即是压差,压差过大则电池不宜继续使用。
四、无人机的遥控器上有控制摇杆和很多的功能按键,机身上也有对频键,电池扣等等,这些按键随着长期地频繁使用都会出现老化和磨损,按键测试其实就是在ZUI大使用强度下,测试这些按键是否能持续正常工作,抗老化的能力有多强,毕竟按键坏了,飞行控制和功能使用都会受到影响,客户体验不佳。
欢迎来北京学习无人机技能,无人机动力系统:
动力系统是为无人机提供动力的装置,无人机一般采用电动动力系统,主要包括:电池、电调、电机、螺旋桨。