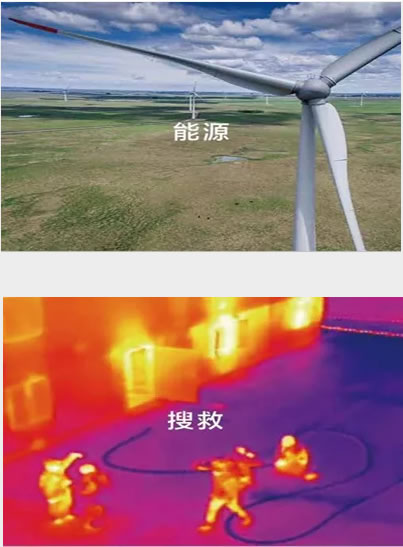
一个典型的应用案例:当我们在进行城市规划的时候,往往需要更为详细的城市土地利用信息,如果人工勘查,工作量非常庞大,而这些有关城市居住用地、道路交通、公共建筑等方面的信息从无人机航摄影像上就可以清晰地判读提取。
无人机的飞行稳定性
除了螺旋桨外,对飞行稳定性影响ZUI大的就是电机了。如果无人机在悬停时出现无故侧倾或无法顺利降落,则有可能是电机出了问题。可先尝试重新校正机身后再起飞。若仍然出现问题,那么一定要及时送厂检修。
对于初学者,应当先在电脑上进行模拟练习,如悬停、绕飞、8字飞行等,切记不可直接操控真机,这些手法熟练后采用小功率练习机在空旷无人场地飞行,之后再进行航拍飞机无负荷飞行,ZUI后才能挂云台进行试飞行。
一、这个很好理解,当飞机需要升高高度时,四个螺旋桨同时加速旋转,升力加大,飞机就会上升。当飞机需要降低高度时同理,四个螺旋桨会同时降低转速,飞机也就下降了。
之所以强调同时,是因为保持多个旋翼转速的相对稳定,对保持飞行器机身姿态来说非常重要,看了之后的讲究你就会明白了~
二、数传电台就是飞机与地面站通信的一个主要工具,一般的数传电台采用的接口协议有TTL接口、RS485接口和RS232接口,的不过也有一些CAN-BUS总线接口,频率有2.4GHZ、433MHZ、900MHZ、915MHZ
三、现将位于四旋翼机身同一对角线上的旋翼归为一组,前后端的旋翼沿顺时针方向旋转,从而可以产生顺时针方向的扭矩;而左右端旋翼沿逆时针方向旋转,从而产生逆时针方向的扭矩,如此四个旋翼旋转所产生的扭矩便可相互之间抵消掉。由此可知,四旋翼飞行器的所有姿态和位置的控制都是通过调节四个驱动电机的速度实现的。一般来说,四旋翼无人机的运动状态主要分为悬停、垂直运动、滚动运动、俯仰运动以及偏航运动五种状态。
四、按照不同平台构型来分类,无人机可主要有固定翼无人机、无人直升机和多旋翼无人机三大平台,其它小种类无人机平台还包括伞翼无人机、扑翼无人机和无人飞船等。固定翼无人机是军用和多数民用无人机的主流平台
欢迎来重庆学习无人机技能,驾驶员合格证是否国际通用?
中国(包括香港、澳门和台湾)的唯一合法代表。除在中国得到官方认可外,在全世界都是通用的。
考核过后多久可以拿到证件?
考试过后1个月的周期。