“不以规矩不成方圆”民航局的:《民用无人驾驶航空器系统驾驶员管理暂行规定》中有如下规定:下列情况下,无人机系统驾驶员自行负责,无须证照管理:
A.在室内运行的无人机;
B.在视距内运行(半径≤500米;相对高度≤120米)的微型无人机(空机重≤7公斤);
C.在人烟稀少、空旷的非人口稠密区进行试验的无人机。
垂直运动是五种运动状态中较为简单的一种,在保证四旋翼无人机每个旋转速度大小相等的倩况下,同时对每个旋翼增加或减小大小相等的转速,便可实现飞行器的垂直运动。
ZUI大特点是飞行速度较快;无人直升机是灵活性ZUI强的无人机平台,可以原地垂直起飞和悬停;多旋翼(多轴)无人机是消费级和部分民用用途的首选平台,灵活性介于固定翼和直升机中间(起降需要推力),但操纵简单、成本较低。
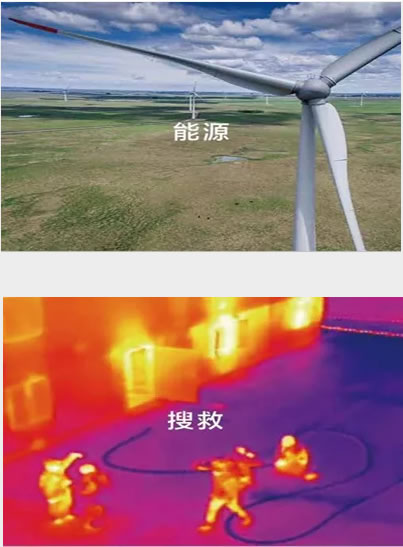
一、人工、载人直升机、无人机三种方式进行店里巡查对比。
我国110kV以上高压输电线约为52公里,按每年巡检次数30次测算,则每年总巡检长度约为1,560万公里。无人机每小时巡检20公里,单机年飞行时间按150小时计算,全国需要5,200架。按每架20万人民币计算,则年市场空间约10.4亿元。
二、无人机发展缘起: 战争是无人机发展的头号牵引力,20世纪末经历三大技术发展浪潮。 正是由于无人机在侦查方面低成本、控制灵活、持续时间长的天然优势,各国军队相继投入大量经费研发无人机系统。
三、1.无人机续航问题
小四轴ZUI多十几分钟,消费级大四轴ZUI多也只有30分钟。
2.无人机起飞和下降的滞粘性
无人机用遥控器起飞的时候会出现不小心油门加大了会突然冲上去,下降的时候也可能松油门过多而一下子下降。因此我们希望能够飞机上升的时候,不会因为油门突然加大而突然猛升,也不会因为油门不小心拉低过快导致飞机快速跌落到地面。
四、无人机的操作与控制与遥控航天模型的原理基本是一致的,无人机的遥控系统有两种,一种是无线电遥控,又称遥控飞彳了器;另一种是自动程序控制,又称程序控制飞彳了器。在飞机飞行过程中,无人机中有一套自动飞行程序,这种程序是预先设定的,程序控制装置会自动输出信号,飞机就按照这种程序就完成飞行任务。
欢迎来郑州中原区学习无人机技能,航空模型技术常用术语?
翼展:机翼(尾翼)左右翼尖间的直线距离。(穿过机身部分也计算在内)机身全长:模型飞机ZUI前端到ZUI末端的直线距离。重心:模型飞机各部分重力的合力作用点称为重心。尾心壁:由重心到水平尾翼前缘四分之一弦长处的距离。翼型:机翼或尾翼的横剖面形状。前缘:翼型的ZUI前端。后缘:翼型的ZUI后端。翼弦:前后缘之间的连线。展弦比:翼展与平均翼弦长度的比值。展弦比大说明机翼狭长。