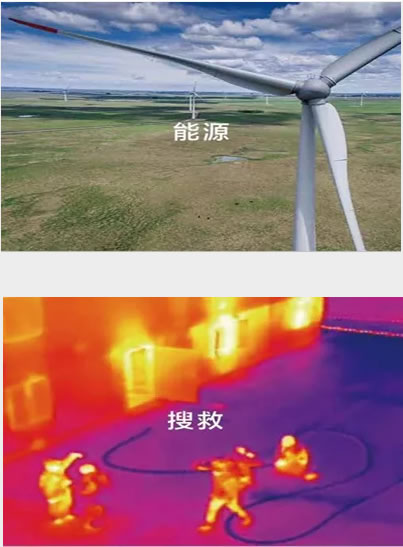
多旋翼运用领域
城市管理、农业、地质、气象、电力、电力巡检、抢险救灾、视频拍摄等行业。
常用的航模术语
8、重心——模型重力的作用点。
9、尾力臂——重心到尾翼1/4弦长的距离。
10、迎角——翼弦与相对气流的夹角。
11、安装角——翼弦与模型横轴之间的夹角。
12、上反角——机翼与模型横轴之间的夹角。
13、风向角——顶风方位与放飞方位之间的夹角。
14、放飞角——模型放飞时,机身立轴与水平面之间的夹角。
校射作用
主要用于火力引导和对射击效果进行评估。装有测距机。自动跟踪电视摄像机、激光指示器和热成像仪,可通过抗干扰的数据链向地面传送位置修正指令,能为“铜斑蛇”激光制导炮弹和机载“海尔法”反坦克导弹指示目标。
一、因此,回到第三条,切勿在人流密集的地方去操作无人机,我很理解大家都跟我一样,朴素的外表下都有一颗装逼的心,买来好东西后都想DI一时间去装下,但!!!!切勿装逼!刚说了,飞行及操作过程中有很多不可控的因素,在人流密集的地方,一但坠机,后果不可想想。
二、无人机的图传系统
图传顾名思义就是把飞机上看到的图像传输到使用者面前的屏幕上,除画面外,图传也传输飞机的飞行数据。因此使用者可在显示屏、APP上看到飞机实时的图像和高度、速度信息。图传通常使用5.8G、2.4G频段。
三、双目立体视觉系统可根据连续图像计算出物体的三维位置,除了避障功能以外还能提供定位与测速。机身下方的超声波模块起到辅助定高的作用,而冗余的IMU和指南针在一个元件受到干扰时,冗余导航系统会自动切换至另一个传感器,极大提高了组合导航的可靠性。
四、四旋翼无人机的各个飞行状态的控制是通过控制对称的四个旋翼的转速,形成相应不同的运动组合实现的。但是在飞行过程中却有六个自由度输出,因此它是一种典型的欠驱动,强耦合的非线性系统。例如,旋翼1的转速会导致无人机向左翻滚,同时逆时针转动的力矩会大于顺时针的力矩,从而进一步使得无人机向左偏航,此外翻滚又会导致无人机的向左平移,可以看出,四旋翼无人机的姿态和平动是耦合的。
欢迎来郑州学习无人机技能,学习期间放假吗?
全日制为确保学员充分练习不出现特殊情况没有假期。
旋翼机型与固定翼机型考核项目都是什么?
多旋翼或直升机:1.起飞;2.慢速自旋一周(360°);3.水平八字;4.降落。
固定翼:1.起飞(逆风);2.四边航线;3.水平八字;4.模拟发动机失效;5.降落(逆风)。