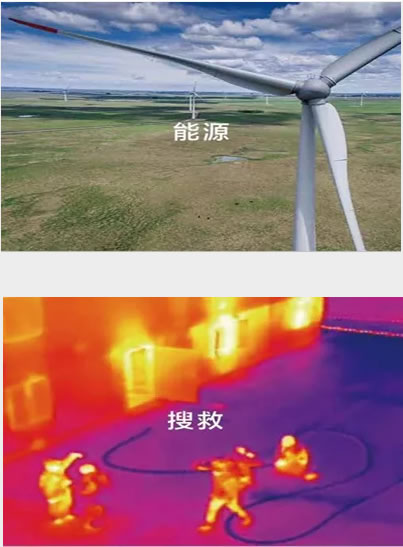
多旋翼运用领域:
城市管理、农业、地质、气象、电力、电力巡检、抢险救灾、视频拍摄等行业。
常用的航模术语
8、重心——模型重力的作用点。
9、尾力臂——重心到尾翼1/4弦长的距离。
10、迎角——翼弦与相对气流的夹角。
11、安装角——翼弦与模型横轴之间的夹角。
12、上反角——机翼与模型横轴之间的夹角。
13、风向角——顶风方位与放飞方位之间的夹角。
14、放飞角——模型放飞时,机身立轴与水平面之间的夹角。
校射作用
主要用于火力引导和对射击效果进行评估。装有测距机。自动跟踪电视摄像机、激光指示器和热成像仪,可通过抗干扰的数据链向地面传送位置修正指令,能为“铜斑蛇”激光制导炮弹和机载“海尔法”反坦克导弹指示目标。
一、因此,回到第三条,切勿在人流密集的地方去操作无人机,我很理解大家都跟我一样,朴素的外表下都有一颗装逼的心,买来好东西后都想DI一时间去装下,但!!!!切勿装逼!刚说了,飞行及操作过程中有很多不可控的因素,在人流密集的地方,一但坠机,后果不可想想。
二、常用的图传有模拟图传和数字图传两种,目前在航拍无人机中数字图传以质量高、传输距离远的优势更受消费者青睐。
而数字图传中,又以大疆的LightBridge技术效果ZUI为拔群,不过ZUI近以色列的AmimonCONNEX公司也推出了低延时的数字图传,不知道效果怎样呢?图传系统
三、正是因为这些传感器技术的完美融合,无人机有了智能导航系统,拓展了活动环境,并提升了可靠性。使用传统导航系统的无人机在室内等无GPS的环境中无法稳定飞行,而智能导航系统在GPS信号良好时,可通过视觉提升速度和位置测量值的精度;在GPS信号不足的时候,视觉系统可以接替GPS提供定位与测速,让无人机在室内与室外环境中均能稳定飞行。
四、四旋翼无人机的精确航迹跟踪是实现无人机自主飞行的基本要求。由于四旋翼无人机自身存在姿态与平动的耦合关系以及模型参数不确定性与外界扰动,因此只有实现姿态的稳定控制才能完成航迹的有效跟踪。
欢迎来郑州学习无人机技能,或许大家并没有好好的关注过无人驾驶飞机的开发前景,也不清楚无人驾驶飞机有多大的投资力量。