无人机的全称是无人驾驶飞机。无人驾驶飞机的设计原理是:利用无线遥控设置来进行控制的不可载人的小型飞机,乍一看类似于小型的飞机模型。但是在无人机上并不会安装驾驶舱,可在无人驾驶飞机的内部会设有驾驶仪和自控装置等高科技设备,而人们通过雷达或无线电等设备在陆地远程对无人机进行操控。
什么是PCM与PPM的差别?
这个主要指的是遥控器编码的方式,PPM相当于模拟传输,直接将无线电波形发射给接收机传给舵机执行,PCM就是首先将信号进行处理,形成数字型号并编码再发射出去,接收机接收需要有一个解码还原的过程,在传递给舵机执行。类似以前的模拟信号传输电视和现在的数字信号电视。?
无人机正反桨:四轴飞行为了抵消螺旋桨的自旋,相邻的桨旋转方向是不一样的,所以需要正反桨。正反桨的风都向下吹。适合顺时针旋转的叫正浆、适合逆时针旋转的是反浆。安装的时候,一定记得无论正反桨,有字的一面是向上的(桨叶圆润的一面要和电机旋转方向一致)。
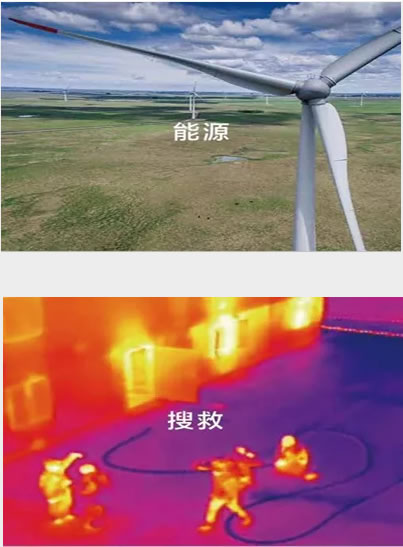
一、森林病虫害检测及防治:使用无人机可实现药物投放批量化,通过人工实施作业,进度慢,作业面积小,成本高。
二、技术标准才ok,另外也要选择质量有保障的无人机
另外一方面,在禁飞区域飞行无人机就容易受到处罚,通过西南无人机飞行服务培训中心学习
无人机培训,不仅能够学到专业的无人机飞行技术,还可以通过飞云系统申请飞行空域,这样 的话,两方面的问题都规避了。
三、消费级航拍无人机在机臂下方一般都有着LED灯,这灯并非仅为装饰,而是大有用处的。
在飞行中前方红色的LED灯起到了表明飞机位置和机头朝向的作用,后方的灯则表明飞机的实时状态,例如飞机正常情况下绿灯慢闪,失控时黄灯快闪,低电量时红灯慢闪。
四、在一个具体的子系统内,元件一般集成使用。一个元件的失效会诱发整个系列的失效。因此元件的可靠性会影响到子系统的可靠性,进而影响无人机系统可靠性。下表表示了元件可靠性与系统可靠性的关系。可靠性的数值大小用“9”的个数表示。例如,一个系统可靠性为99.99%,就是说可靠性为4个9。
欢迎来鹤壁市学习无人机技能,法规同时规定在其它情况必须需要无人机“驾照”。
换句话说:在飞出视距(距离超过500米或者高度超过120米),或者驾驶空机重量大于7公斤的无人机都是需要AOPA“驾照”的。