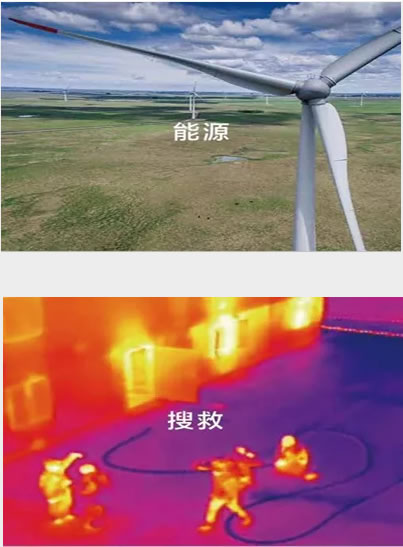
无人机(UAV)被广泛应用于多种场合,包括检查、观察和救援任务。无人机的设计从大型的固定翼喷气式飞机到较小型的具有一个或多个旋翼的旋翼飞行器。电子行业在过去几十年的进步使得无人机系统的必需部件能够缩小,甚至可能成为掌上型微型飞行器(MAV)。这些飞行器可以拍摄并传输图像,具有很高的机动性。微型无人机的尺寸和机动性使之成为近距离应用的理想工具,例如视察和监视。微型无人机重量轻,适合单人使用,甚至可以做到一个人控制数架飞机,进行撒网式、多角度、立体化观察。不会增加单人负荷的同时可大大增加行动灵活性。微型飞行器还可用来加强现场个体之间的联系和信息共享。
提升飞行技巧
没事就跟朋友一起玩,论坛、qq、微信、面对面各种交流,不断提升自己的飞行技巧,增强自己的信心,对稳定操控无人机有着重要的作用。
以上10点,如果都能遵守并且坚持下去,相信在操作无人机时就会变得更安全。
当飞行时,M2、M4所产生的逆时针反作用力(反扭矩)和M1、M3产生的顺时针反作用力(反扭矩)相抵消,飞机机身就可以保持稳定,不会像大雄那样「疯狂」自转了。
不仅如此,多轴飞机的前后左右或是旋转飞行的也都是靠多个螺旋桨的转速控制来实现的:
一、这里就有讲到数传电台,数传电台就是数据传输电台,类似我们ZUI和耳朵一样,好比领导说今天做什么任务,我们接受到任务并回答然后再去执行任务,执行任务的时候时实情况实时汇报给领导,这其中通信就是嘴巴和耳朵。
二、四旋翼每个电机均又与电机驱动部件、中央控制单元相连接,通过中央控制单元提供的控制信号来调节转速大小;IMU惯性测量单元为中央控制单元提供姿态解算的数据,机身上的检测模块为无人机提供了解自身位姿情况ZUI直接的数据,为四旋翼无人机ZUI终实现复杂环境下的自主飞行提供了保障。
三、广义地看也包括临近空间飞行器(20-100公里空域),如平流层飞艇、高空气球、太阳能无人机等。从某种角度来看,无人机可以在无人驾驶的条件下完成复杂空中飞行任务和各种负载任务,可以被看做是“空中机器人”。
四、2013年3月,国家电网公司出台《国家电网公司输电线路直升机、无人机和人工协同巡检模式试点工作方案》。方案指出,建立直升机、无人机和人工巡检相互协同的新型巡检模式是坚强智能电网发展的迫切需要,目前公司系统直升机巡检作业正在逐步向规范化、制度化方向发展,为此公司选定山东、冀北、山西、湖北、四川、重庆、浙江、福建、辽宁、青海十个检修公司作为试点单位,利用2-3年时间开展开展新型巡检模式试点工作。到2015年,国网公司系统将全面推广直升机、无人机和人工巡检相互协同的输电线路新型巡检模式。
欢迎来郑州金水区学习无人机技能,当飞行环境不符合GPS和视觉工作的时候,无人机就回到了原本会飘的那个状态。
如果要在无人机可能进入姿态模式的复杂环境下飞行,可以回顾我们以往的飞行练习教程哦。(直达链接在文章底栏)