什么叫航空模型?
在国际航联制定的竞赛规则里明确规定“航空模型是一种重于空气的,有尺寸限制的,带有或不带有发动机的,不能载人的航空器”就叫航空模型,其技术要求是:
垂直运动是五种运动状态中较为简单的一种,在保证四旋翼无人机每个旋转速度大小相等的倩况下,同时对每个旋翼增加或减小大小相等的转速,便可实现飞行器的垂直运动。
按不同使用领域来划分,无人机可分为军用、民用和消费级三大类,对于无人机的性能要求各有偏重:
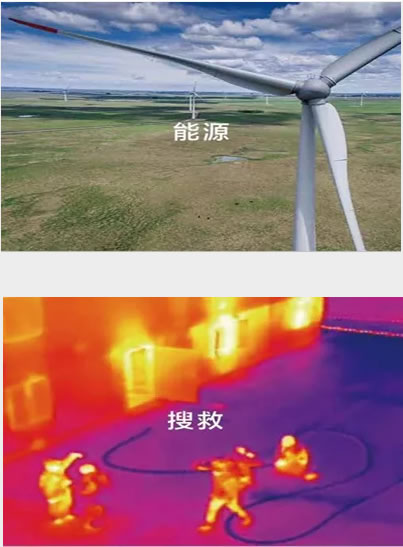
一、森林防火:需求迫切,尚处初始阶段
我国拥有森林面积1.75亿公顷,森林蓄积量为124.56亿立方米,森林覆盖率为18.21%,既是森林资源大国,又是森林火灾多发国家。
二、毫无疑问,无人机发展的初期是为了纯粹的军事用途:一战时期英国研制的世界DI一款无人机被定义为“会飞的炸弹”,二战时期德军已经开始大量应用无人驾驶轰炸机参战;二战后无人机研发的中心出现在美国和以色列,用途延伸至战地侦察和情报搜集,无人机被派往朝鲜、越南和海湾战场协助美军和以色列军队作战。
三、当然这难不倒我们,还拿上图的四旋翼来说,当需要按照三角箭头方向前进时,M3、M4电机螺旋桨会提高转速,同时M1、M2电机螺旋桨降低转速,由于飞机后部的升力大于飞机前部,飞机的姿态会向前倾斜。
四、飞控系统主要用于飞行姿态控制和导航,对于飞控而言,首先要知道飞行器当前的状态,比如:三维位置、三维速度、三维加速度、三轴角度和三轴角速度等,总共15个状态。由于多旋翼飞行器本身是一种不稳定系统,要对各个电机的动力进行超高频率地不断调整和动力分配,才能实现稳定悬停和飞行,
欢迎来郑州管城区学习无人机技能,无人机的螺旋桨由无刷电机驱动,用高速旋转来产生飞行所需的推力。每个电机都有相应的速度控制单元,可以对转子速度进行微调。而通过改变螺旋桨之间的相对速度,可以实现无人机的俯仰、拐弯、滚转和升降。