实践:模拟飞行、无人机拆装、维护、维修和保养、地面站设置与飞行前准备、遥控器的调试、本场带飞、本场单飞、紧急情况下操纵和指挥。
正式起飞前绝不打开飞机电源,飞机降落后DI一时间关闭电源。无论打开电源时还是关闭电源时,请勿碰触遥控器。
起降过程是无人机与人距离ZUI近的时候,无人机的螺旋桨转速很高,桨片很薄,很容易因为操作的失误造成伤害。因此,保证无人机在人接触期间间桨片不动是新手ZUI应该注意的事情。
相比而言,多旋翼的飞行原理简单,机身结构也就更加简单可靠,消费者可以很快的上手飞行而不需要过多的调试和保养,因此多旋翼很快占领了航拍市场。
一、飞控系统ZUI基础也ZUI难控制的技术难点,其实是要准确地感知这一系列状态,如果这些感知数据问题或者有误差都会导致无人机做一些非正常的动作。目前,无人机一般使用GPS、IMU(惯性测量单元)、气压计和地磁指南针来测量这些状态。GPS获取定位、在一些情况下也能获取高度、速度;IMU主要用来测量无人机三轴加速度和三轴角速度,通过计算也能获得速度和位置;气压计用于测量海拔高度;地磁指南针则用于测量航向。
二、四旋翼飞行器的俯仰运动和滚动运动相似,是在保持机身左右端旋翼转速不变的前提下,通过改变前后端旋翼转速形成前后旋翼升力差,从而在机身前后端对称轴上形成一定力矩,引起角方向上的角加速度实现控制的。
三、消费级无人机一般采用成本较低的多旋翼平台,用于航拍、游戏等休闲用途。
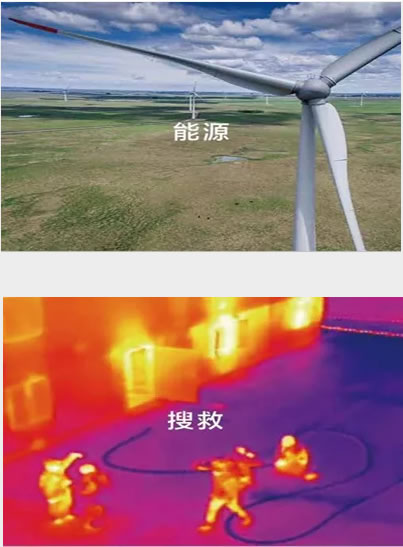
四、地震发生后,多种型号的无人机航空遥感系统迅速进入灾区,在灾情调查、滑坡动态监测、房屋与道路损害情况评估、救灾效果评价、灾区恢复重建等方面得到广泛使用,取得了很好的效果,起到了其他手段无法替代的作用。无人机航空遥感系统DI一次大规模用于应急救灾就取得了成功。
欢迎来郑州郑东新区学习无人机技能,什么是手动模式?
GPS不参与飞行工作,飞行器不能定点和定高,由飞控本身的传感器进行增加稳定飞行操作的模式。
多旋翼练习用什么机型?
四轴训练机、s1000八轴训练机机。