其中,机身大量装配的各种传感器(包括角速率、姿态、位置、加速度、高度和空速等)是飞控系统的基础,是保证飞机控制精度的关键,在不同飞行环境下、不同用途的无人机对传感器的配置要求也不同。
无人机陀螺仪:理论上陀螺只测试旋转角速度,但实际上所有的陀螺都对加速度敏感,而重力加速度在我们地球上又是无处不在,并且实际应用中,很难保证陀螺不受冲击和振动产生的加速度的影响,所以再实际应用中陀螺对加速度的敏感程度就非常的重要,因为振动敏感度是ZUI大的误差源。两轴陀螺仪能起到增稳作用,三轴陀螺仪能够自稳。
一、无人机管理与使用规定:
民用无人驾驶航空器实名制登记管理规定:行业征求意见稿显示,进行实名登记的无人机为250克以上(包括250克)的无人机,实名登记工作将于6月1日正式开始,针对已经拥有无人机的个人或单位,实名登记工作需在8月31日前完成。登记信息包括拥有者的姓名(单位名称和法人姓名)、有效证件、移动电话、电子邮箱、产品型号、产品序号和使用目的等。
二、航拍无人机分为直升无人机、固定翼无人机、多旋翼无人机、伞翼无人机、无人飞艇等几大类。其中多旋翼无人机是操作ZUI简便,常见的有四旋翼、六旋翼、八旋翼等。直升机无人机由于只有一个轴,控制起来相对比较难,需要比较专业的操控技术。固定翼无人机多用来做大范围的航拍(主要获取的是航片而非视频),这种飞机要求专业的操控手。
三、超声波/视觉定位/视觉避障' 超声波模块,运用了超声波原理来在低空情况下精准定高;两侧较小的两个圆形是视觉定位模块,类似两个眼睛,利用了图像识别技术使其在室内也可悬停。
四、冗余分工作冗余和备用冗余两种。工作冗余是指所有冗余同时处于工作状态;而备用冗余是指原来工作的冗余发生故障后,替代冗余才开始工作的情况。比如电传操纵飞机的多余度飞行控制系统就是典型的工作冗余。下图表示了冗余与失效率的关系。
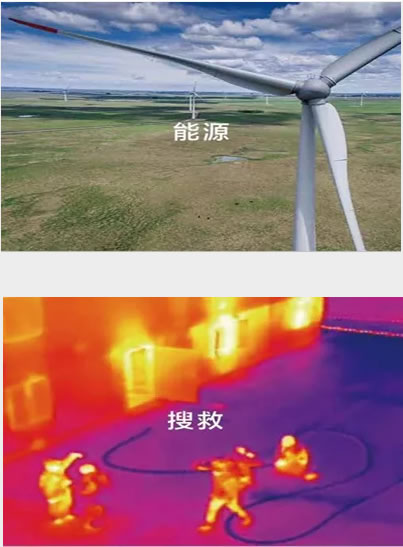
欢迎来濮阳市学习无人机技能,近年来人们看到的许多山河风光,还有校园全景等需要全场照片的,都是用无人驾驶飞机中的航拍无人机来完成的。航拍无人机的飞行高度通常在五百米之上,十分适用于拍摄鸟瞰图这种全景。