几年来,防撞系统称得上是一大技术进步,该技术可以通过视觉、声波和红外线传感器来识别和避开障碍物。视觉传感器可以让无人机“看”到物体,并在飞机撞上之前停下,但它的识别距离通常比较有限(大约15米左右)。
螺旋桨也常用4位数来表示尺寸,例如精灵4采用9450桨叶,其中前两位表示桨叶的直径,后两位表示桨叶的螺距。
在无人机可靠性设计中,零部件的质量必须保证。对于一些复杂的零部件,开发商必须调查更多的因素和后勤问题,比如:零部件制造商的声誉、零部件在其它领域的使用及性能状况等。有时即使是个别零件的可靠性符合要求,但整个系统的可靠性却达不到要求。
一、只有在保证飞机姿态可以保持稳定才能进一步讨论如何控制路径保持稳定,在时间尺度上进行分析,飞机的姿态角变化的频率要大于飞机位置的频率。所以,针对轨迹跟踪应当使用内外双环控制,内环控制姿态角,外环控制位置。
二、无人机电调:电子调速器,将飞控的控制信号,转变为电流信号,用于控制电机转速。因为电机的电流是很大的,通常每个电机正常工作时,平均有3A左右的电流,如果没有电调的存在,飞控根本无法承受这样大的电流,而且飞控也没有驱动无刷电机的功能。同时电调在多旋翼无人机中也充当了电压变化器的作用,将11.1V电压变为5V电压给飞控供电。
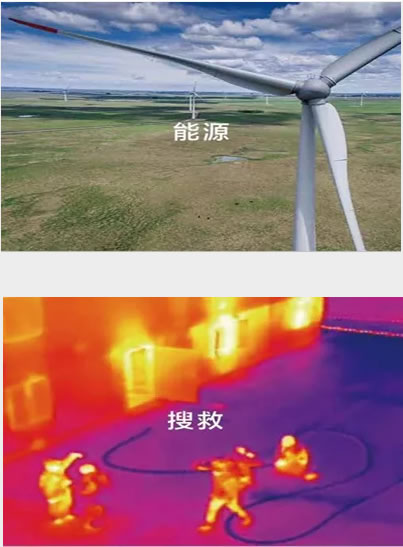
三、使用飞控导航自主作业只需在喷洒作业前,将农田里农作物的GPS信息采集到,并把航线规划好,输入到地面站,无人机可进行全自主作业,在田间地头起飞对农作物实施作业,作业完成之后自动飞回到起飞点。而在飞机喷洒作业的同时,还可通过地面站的显示界面实时观察喷洒作业的进展情况。由于不需要人工干预,大大降低了操作难度,没有飞机相关专业知识的农户也可以操作使用。
四、无人机航拍飞行器的选择
现在的无人机航拍,大体的分为航模无人机和多旋翼无人机两种,由于它们成本较低,这让高技术、高难度的航拍大大地降低了门槛,变得平易近人。
欢迎来郑州郑东新区学习无人机技能,无人机的分类:
无人机分类的依据主要有:机身结构、机身重量、活动范围、任务高度及用途等。