无人机的螺旋桨由无刷电机驱动,用高速旋转来产生飞行所需的推力。每个电机都有相应的速度控制单元,可以对转子速度进行微调。而通过改变螺旋桨之间的相对速度,可以实现无人机的俯仰、拐弯、滚转和升降。
有了ZUI基本的平衡、定高和指南针等功能,还不足以让一家飞机能够自主导航,就像我们去某个商场一样,首先我们需要知道商场的所在位置,知道自己所在的位置,然后根据交通情况规划路线。
飞行控制系统的地面部分包括:飞行操纵和指令系统,飞行监控及显示系统,飞行定位系统,飞行自动指令系统。地面飞控系统通过无线数据通讯系统耦合为一个整体系统。无人机的发射和回收有多种方式。发射方式有空中投放、弹射起飞、滑跑起飞、滑轨起飞、借助起飞车滑跑起飞等。回收方式有降落伞回收、空中回收、拦阻回收。
一、任何一位职业飞手,都应该完全掌握姿态模式下的飞行。同时,在任意机头方向下,都要能够操作无人机去往想要的正确方向,不会打反。
二、考无人机驾照的条件
报考AOPA无人机驾驶员合格证的要求为:1)年满17周岁,初中以上文化程度。2)遵纪守法,无不良行为,提供无犯罪记录申明3)身体要求:矫正视力1.0以上,无色盲、色弱,无传染性疾病、无心脑血管及精神类疾病,肢体无残疾,无不良嗜好。
三、横滚:Roll,由美国手右摇杆左右控制,打杆控制飞机向左/右飞行。
固定翼,所以在横滚时也会前后位置变化,而多轴飞行器横滚时不会前后飞行,只会左右飞行。
航向:Yaw,有美国手左摇杆左右控制,打杆控制飞机向左/右旋转。
由于图示中的飞机是固定翼,所以在旋转时也会有位置变化,而多轴飞行器旋转时不会位移,只会原地旋转。
四、无人机内部有很多的传感器,比如IMU惯性测量单元,这些感知的数据如果因为振动受影响,ZUI终的结果就是飞行器可能会“疯”掉,完全不受控制;其次,内部硬件结构复杂,机身的一体化强度要求较高,如果振动导致硬件连接异常,螺丝或者模块松懈等等,其实都是不能容忍的。
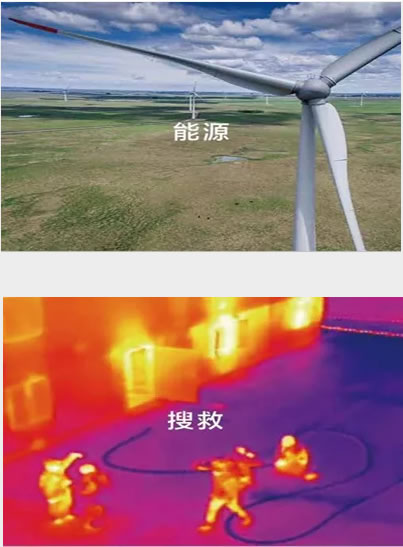
欢迎来信阳市学习无人机技能,想象一下这样的场景,你在非洲的一个救助区,病人需要紧急输血,你会怎么做?通过手机进行求助,相信很快会有人对你的求助做出回应,不过,血液可能要好多天之后才能到达,因为道路太差。所以,在偏远及交通欠发达的乡村地区,无人机的另一重要应用便是为我们提供一个快速穿越糟糕道路、运输轻小型物资的途径。